Creators of the iconic iRonCub3 have introduced a new control method that helps the jet-powered humanoid robot stay stable and follow flight paths in simulation, a step forward for efforts to combine walking robots with airborne mobility.
The study, titled Unified Multirate Model Predictive Control for a Jet-Powered Humanoid Robot, presents a Model Predictive Control (MPC) framework that explicitly models both the robot’s flight dynamics and the slower, nonlinear behaviour of its jet engines.
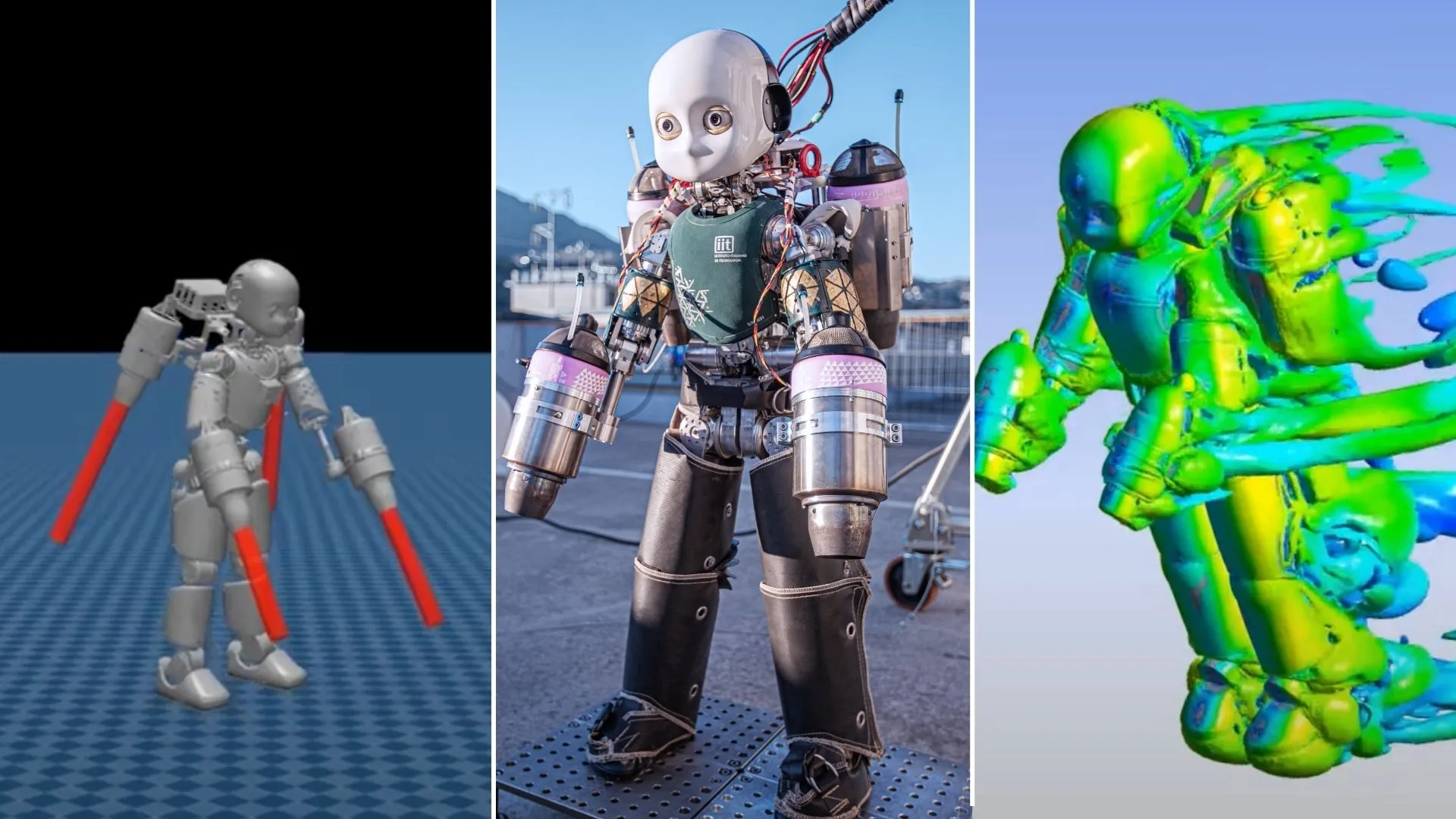
The authors validated the approach on the iRonCub platform using Mujoco simulations and reported strong disturbance rejection and stable trajectory tracking.
Aligning fast joints with slow jets
The paper’s central innovation is a multirate MPC design that reconciles the different response speeds of a humanoid’s joint actuators and jet engines. The controller uses a linearised centroidal momentum model to represent the robot’s flight dynamics and augments that with a second-order nonlinear model for the jet propulsion system.
That combined predictive model lets the controller compute joint commands at a high update rate while issuing throttle commands to the jets at a lower rate, matching each actuator to its physical capability. According to the reseachers, this unified multirate architecture improves responsiveness and stability by preventing faster subsystems from being held back by slower ones and embedding the jets’ dynamics directly into the prediction horizon.
Simulated tests show disturbance recovery and trajectory tracking
Validation was performed in MuJoCo, with the jet dynamics represented by a neural network trained to capture complex engine behaviour.
The team ran scenarios, including a backward push to induce forward pitching and a lateral force that caused rolling, and found the controller could stabilise the robot in both cases. Trajectory tracking was assessed using two kinds of reference paths.
A smooth minimum-jerk trajectory and a more aggressive, high-acceleration route. For the smooth motion, the controller accurately tracked the robot’s centre of mass in the horizontal plane and maintained orientation, with only a small steady-state offset in vertical position.
Under the dynamic trajectory, tracking errors increased as expected, but the robot retained stability and followed the overall shape of the path.
The simulation code for iRonCub is available on GitHub, allowing other researchers to reproduce and build on the results. The authors present the multirate MPC as a practical way to manage mixed-rate actuation in systems where directed thrust and rapid joint motion must be coordinated.
From lab novelty to practical vision
The work comes from tangible progress in the iRonCub project at the Italian Institute of Technology in Genoa. After nearly a decade of development, the iRonCub3 platform achieved lift-off this summer, with four jet engines lifting the humanoid about 50 centimetres for several seconds.
Lab director Daniele Pucci frames the effort as more than an academic stunt: “We believe in contributing to something unique in the future,” he says, pointing to potential disaster-response roles in which a robot could fly over obstacles and then walk and manipulate objects on the ground.
Commentators also see broader value in the research beyond flying humanoids. As IEEE Spectrum’s Evan Ackerman notes, thrust estimation and aerodynamic compensation algorithms have immediate applications for other directed-thrust vehicles, including eVTOL designs, and flagship projects like iRonCub help attract and retain talent.



